
An International Collaboration for Smarter, Safer, and Greener Maritime Navigation in the Virtual Sea Trial project
Author: Dragos Truscan, Professor, Information Technology, Åbo Akademi University.
Towards Sustainable and Safe Maritime Transport
Maritime transport remains the backbone of global trade, yet it faces growing challenges related to safety, energy efficiency, and environmental sustainability.
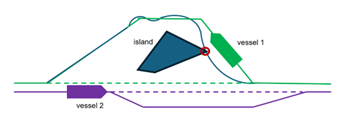
The International Regulations for Preventing Collisions at Sea (COLREGs), adopted by the International Maritime Organization (IMO), form the cornerstone of maritime safety. These rules govern how vessels should behave to avoid collisions — specifying actions such as which vessel has the right of way, how to interpret lights and signals, and how to manoeuvre in various encounter situations (crossing, head-on, overtaking, etc.).
While COLREGs are well-understood by human navigators, their practical application in automated systems is far from straightforward. Translating human judgment, context awareness, and real-time decision-making into computational logic remains a challenge.
A fundamental difficulty arises from the interpretative nature of the COLREGs themselves. Many of the rules contain terms such as “safe speed,” “early and substantial action,” or “risk of collision” — expressions that rely on context, experience, and subjective judgment.
Smarter Navigation through Artificial Intelligence and Dynamic Simulation Models
In a recent collaborative work, researchers from the Åbo Akademi University, Finland (a partner in the Virtual Sea Trial project), Tallinn University of Technology, Estonia, and Tunis El Manar University, Tunisia, have joined forces to address these issues through advanced computational modelling, artificial intelligence and dynamic simulations.
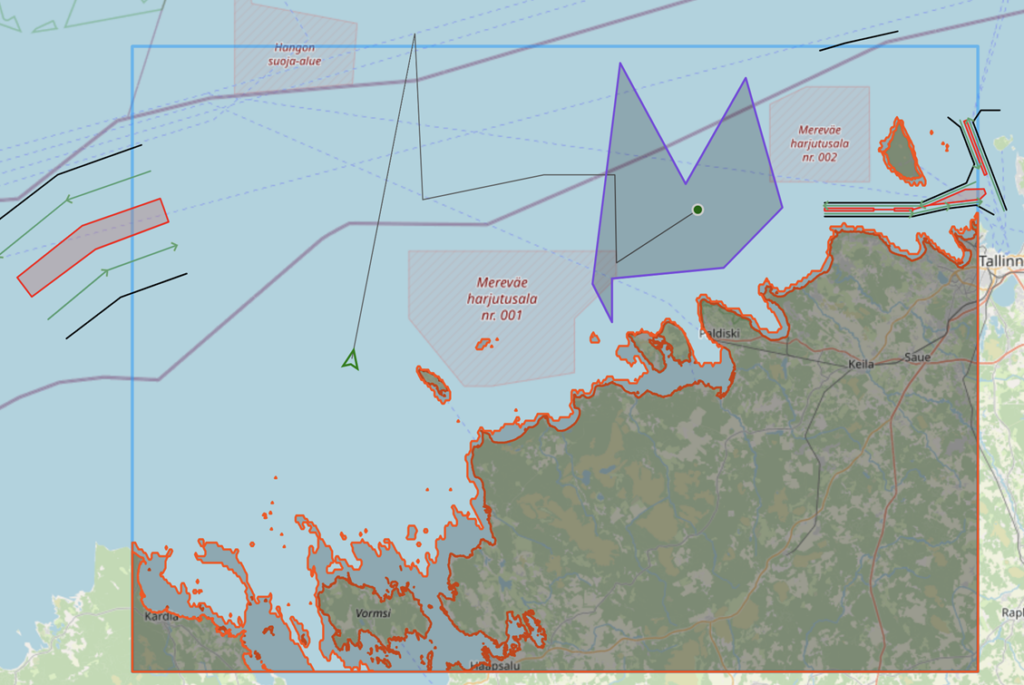
Their joint paper, titled “Two-way Path Planning for Fuel-Efficient Safe Navigation”, presents a novel method for maritime route optimization that leverages constraint logic programming and model-based simulation to generate realistic, COLREG-compliant navigation paths — routes that respect international collision avoidance regulations while being optimized for a specific goal like fuel efficiency.
The work not only advances the state of research in autonomous and semi-autonomous ship navigation but also contributes to global sustainability goals. By optimizing routes for both fuel efficiency and safety compliance, this work supports efforts to reduce the environmental footprint of maritime transport while improving operational safety.
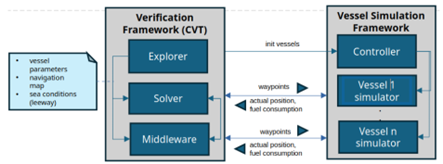
The approach uses two components, a Constraint Logic Programming-based Verification Tool (CVT) and a Vessel Simulation Framework (VSF). CVT solves safety constraints in conformity with COLREG rules and provides the fuel-efficient reference routes of vessels in multi-ship encounter situations. The fuel efficiency and safe path computation are based on inductive logic programming, an AI approach that learns from logical rules and background. VSF applies the characteristics of the vessel dynamics in the refined simulation implemented in the Open Simulation Platform (OSP), and returns the corrections of the reference route together with the operation data of the vessel such as cumulative fuel consumption, actual vessel positions, etc.
Such a process is computationally intensive due to the large state space to be explored when computing the situation aware navigation decisions. By introducing geometric movement constraints in the refinement process, the researchers significantly reduced the computational complexity of the search space — by up to 90%, according to preliminary results. This not only increases efficiency, but also enables more realistic and fuel-efficient routes, promoting sustainable maritime operations and porting of the algorithms onto real autonomous vessels.
The work has been presented in the 5th European Workshop on Maritime Systems Resilience and Security, taking place 21-22 May 2025 in Rostock, Germany. A full version of the publication can be found at Zenodo.
International Cooperation Drives Innovation
The collaboration serves as a model for how universities can combine their strengths to address complex, real-world problems — transcending borders to build technologies that make global transport safer, greener, and smarter. Each partner university brought unique expertise that complemented the others, while together, the collaboration fostered a cross-disciplinary approach, merging software engineering, artificial intelligence, and maritime science — and demonstrating the power of combining Nordic, Baltic, and Mediterranean academic strengths.
By blending academic rigor, technological innovation, and international cooperation, this project contributes a vital step toward the next generation of intelligent maritime systems — where efficiency, safety, and sustainability can coexist harmoniously on the high seas.
Future work
The collaboration between the partners will continue with focus on enhancing the CVT-VSF framework with stochastic modelling capabilities, enabling it to estimate and incorporate path disturbances and data imprecision directly within the path planning process. By embedding such uncertainty-aware mechanisms, the system will be able to account for external factors—such as wind, waves, and sensor inaccuracies—thereby producing navigation paths that are more robust, adaptive, and risk-sensitive.
Another important line of development involves the integration of external data sources for automatic and continuous model updates. Real-time vessel data from platforms like myShipTracking can dynamically inform traffic and behaviour models, while environmental datasets from resources such as the NOAA Office for Coastal Management’s Sea Level Rise Viewer can offer valuable insights into evolving coastal and environmental conditions. This integration will support the system’s ability to automatically adjust navigational safety margins in response to changing surroundings.
In parallel, efforts are underway to port the CVT-VSF framework to the AI-Captain stack of MindChip’s commercial M-series Maritime Autonomous Surface Ships (MASSs). This transition will require adapting the framework for full compatibility with AI-Captain’s planning interface and middleware, enabling real-time interaction with onboard sensor data and autonomous control systems.
Together, these advances will significantly strengthen the scalability, adaptability, and operational readiness of the proposed planning framework, ensuring its effectiveness and resilience in real-world maritime environments.
A collaboration between:
Åbo Akademi University

Tallin University of Technology

Tunis El Manar University